Shallow-Water Modelling
Considering a sheet of inviscid fluid with constant and uniform density.
The height of the surface of the fluid above the reference level $z = 0$ is $h(x, y, t)$. With application to the earth's atmosphere or ocean in mind, we model the body force arising from the potential $\Phi$ as a vector, $g$, directed perpendicular to the $z = 0$ surface.
The rotation axis of the fluid coincides with the $z$-axis in the model, i.e., $\Omega = k\Omega$,
so that in this case the Coriolis parameter $f$ is simply $2\Omega$.
The rigid bottom is defined by the surface $z = h_B(x,y)$.
The velocity has components $u, v,$ and $w$ parallel to the $x$-, $y$-, and $z$-axes respectively
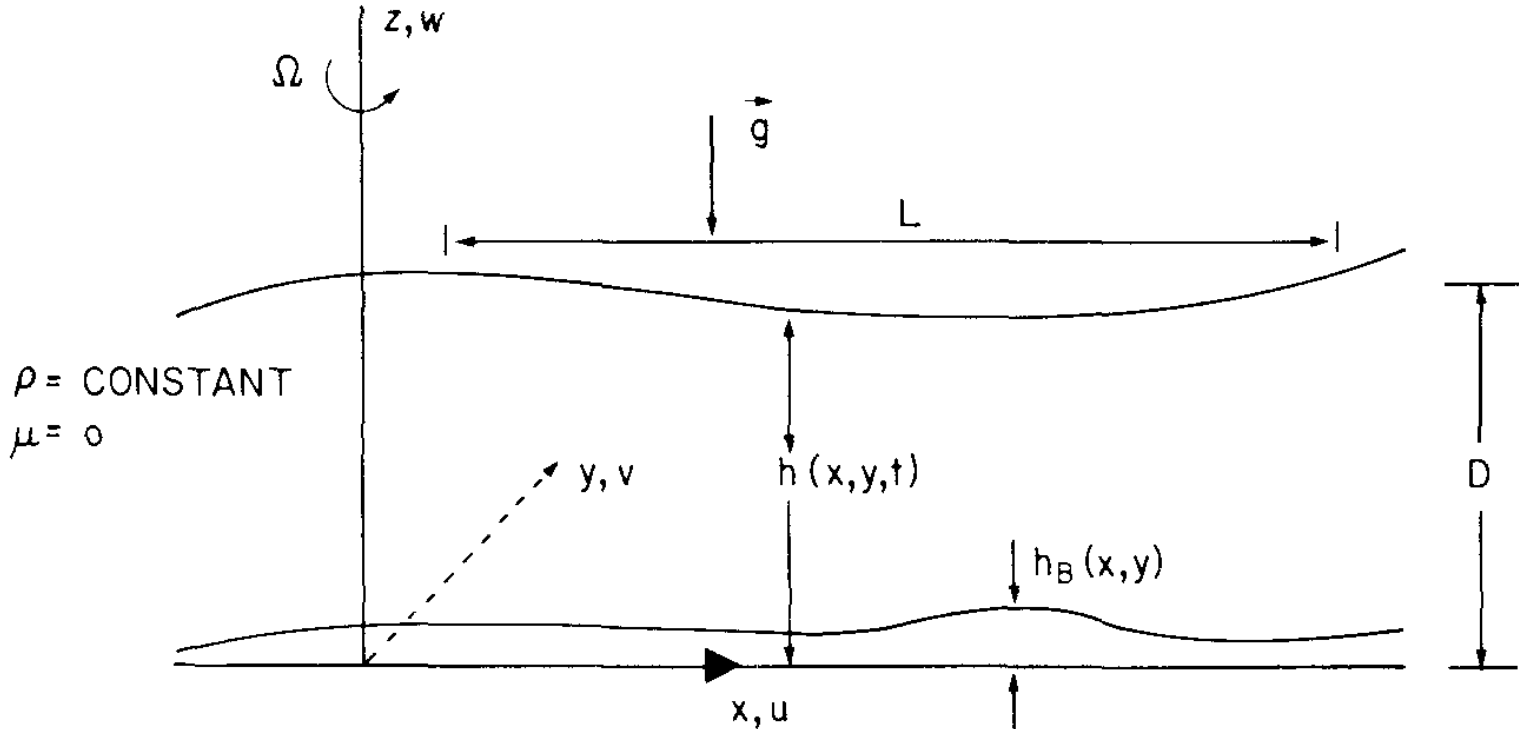
Although the depth of the fluid $h - h_B$ varies in space and time, we suppose that a characteristic value for the depth $D$ could be chosen, to be the average depth of the layer. We also suppose that $D$ characterizes the vertical scale of the motion as well. Similarly, we suppose there exists a characteristic horizontal length scale for the motion, which we call $L$. The fundamental parametric condition which characterizes shallow-water theory is $$ \delta = \frac{D}{L} \ll 1 $$
It is traditional to think in terms of a layer of water, but obviously any incompressible fluid such as air flowing at low speeds will be just as appropriate
1Pedlosky, J. (1982). Geophysical Fluid Dynamics. Springer study edition. Springer, Berlin, Heidelberg.