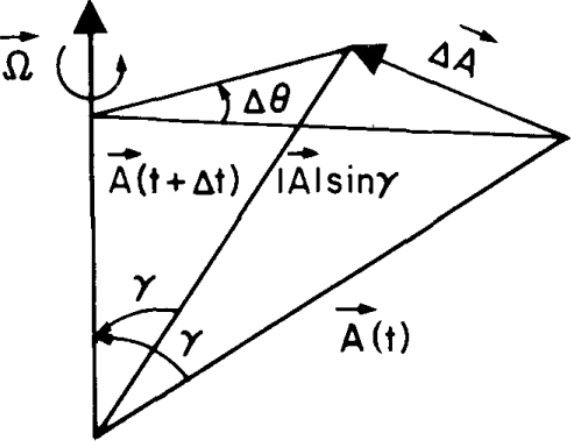
In the limit \( \Delta t \rightarrow 0 \), \[ \lim_{\Delta t \to 0} \frac{\Delta \mathbf{A}}{\Delta t} = \frac{d \mathbf{A}}{dt} = |\mathbf{A}| \sin \gamma \, \frac{d\theta}{dt} \, \frac{\boldsymbol{\Omega} \times \mathbf{A}}{|\boldsymbol{\Omega} \times \mathbf{A}|} \] \[\because |\boldsymbol{\Omega} \times \mathbf{A}| = |\boldsymbol{\Omega}| \, |\mathbf{A}| \sin \gamma \Rightarrow \boxed{ \frac{d \mathbf{A}}{dt} = \boldsymbol{\Omega} \times \mathbf{A} } \] for a vector of fixed magnitude
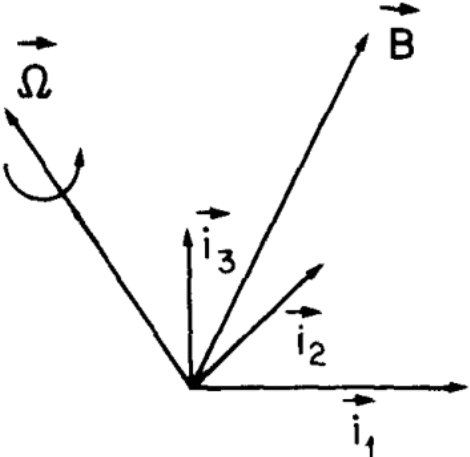
Vector in rotating frame: \(
\mathbf{B} = B_1 \mathbf{i}_1 + B_2 \mathbf{i}_2 + B_3 \mathbf{i}_3
\)
Component definition (projection of \( \mathbf{B} \) along basis vectors):
\(
B_j = \mathbf{i}_j \cdot \mathbf{B}, j = 1, 2, 3
\)
Time derivative of a vector in rotating frame:
\(
\left( \frac{d \mathbf{B}}{dt} \right)_R = \frac{d B_1}{dt} \mathbf{i}_1 + \frac{d B_2}{dt} \mathbf{i}_2 + \frac{d B_3}{dt} \mathbf{i}_3
\) (The time rate of change of \( \mathbf{B} \))
1 Pedlosky, J. (1982). Geophysical Fluid Dynamics. Springer study edition. Springer, Berlin, Heidelberg.