Vectors and Tensors: Vectors and first-order tensors have both a magnitude and a direction. A vector can be completely described by its components along three orthogonal coordinate directions. The components of a vector may change with a change in the coordinate system, and vectors are typically denoted using boldface symbols.
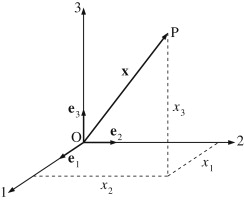
Common vectors in fluid mechanics include position \( \mathbf{x} \), fluid velocity \( \mathbf{u} \), and gravitational acceleration \( \mathbf{g} \). In a Cartesian coordinate system with unit vectors \( \mathbf{e_1}, \mathbf{e_2}, \mathbf{e_3} \), the position vector is expressed as \( \mathbf{x} = x_1 \mathbf{e_1} + x_2 \mathbf{e_2} + x_3 \mathbf{e_3} \).
The transpose of a vector swaps its row and column representation: \( \mathbf{x}^{\top} = [x_1 \quad x_2 \quad x_3] \).
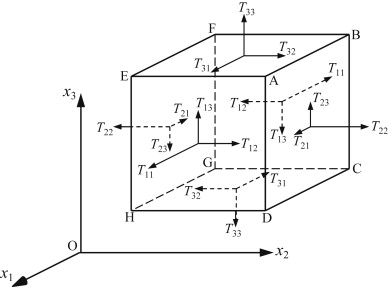
Second-order tensors extend these concepts to pairs of coordinate directions, such as the stress tensor \( \mathbf{T} \), which has nine components in three-dimensional space.
1Tensor Calculus:
https://www.youtube.com/watch?v=uaQeXi4E7gA&list=PLdgVBOaXkb9D6zw47gsrtE5XqLeRPh27_&index=2
2A tensor is something that transforms like a tensor! A. Zee, Einstein Gravity in a Nutshell.